CARLINK Equipment used by the consortium
In CARLINK::UMA, real and analytical test experiments are being carried out by a set of physical elements consisting of: process machines, antennaes, communication devices, laptops and PDAs. These elements are mainly used in high performance process calculations, simulation tasks, real evaluation of communication protocols and preliminaries applications. Therefore, several prototypes are completely tested, providing a basic work platform. The pictures below show several examples of the CARLINK::UMA devices. Click images to enlarge
- Equipment used at UMA for CARLINK
- Equipment used at FMI for CARLINK
- Equipment used at ETRA for CARLINK
 |

|
 |
 |
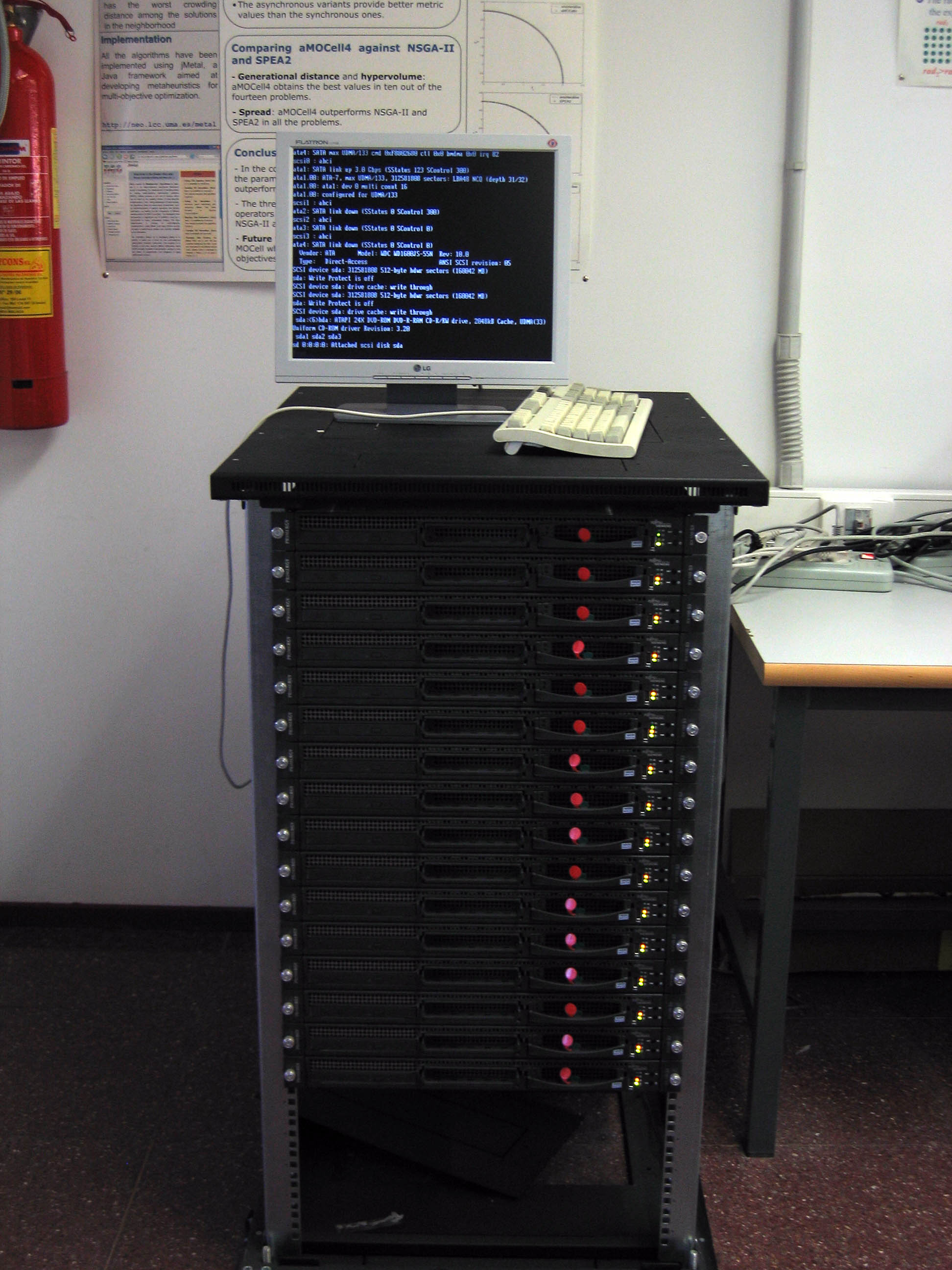
| Simulating a VANET is computationally very hard: we are using a network of biprocessors for this. |
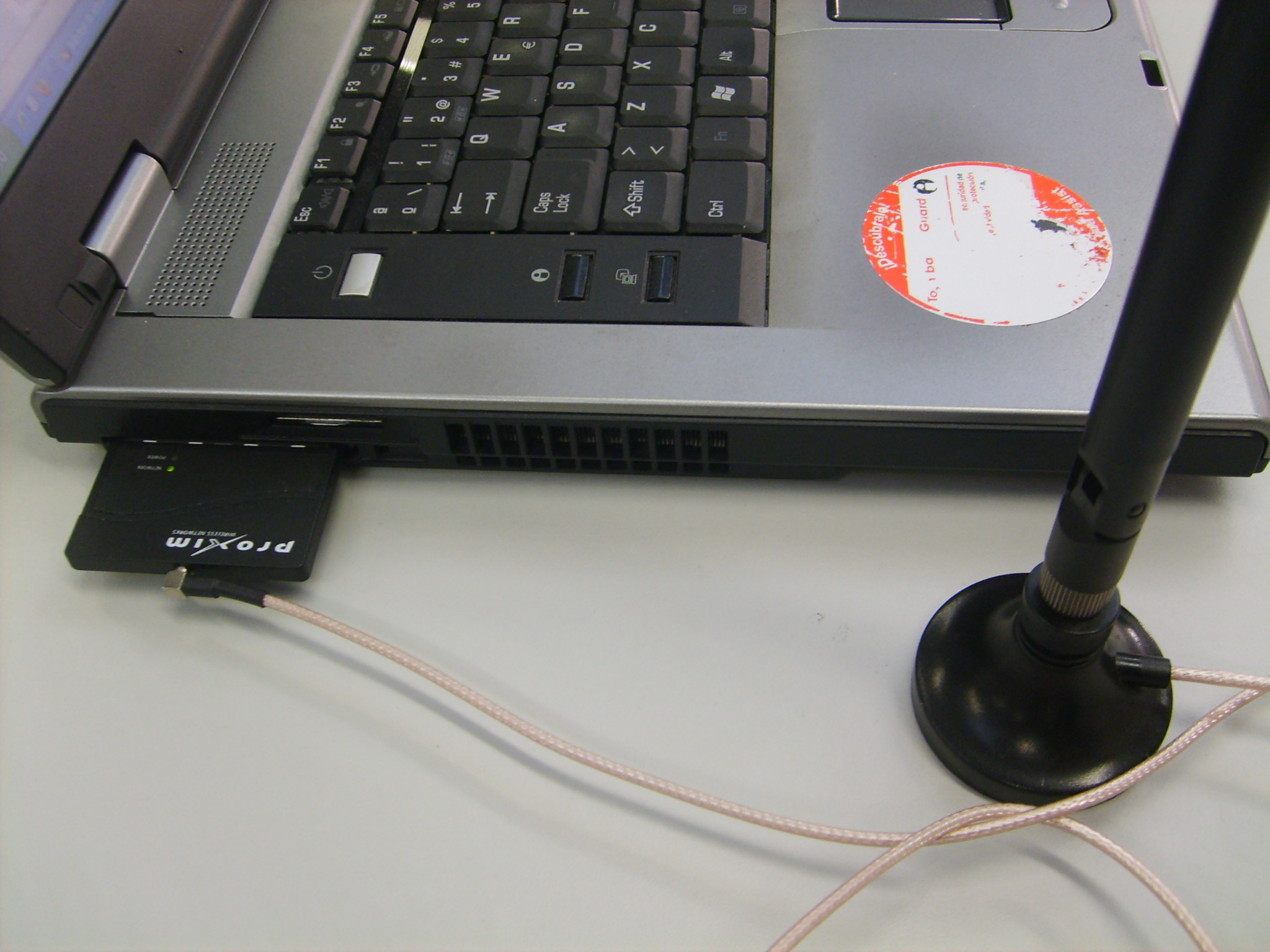
We connect two cars via laptops equiped with Orinoco wireless cards, small wifi routers and omnidirectional antennaes with magnetic base. |
A detail on the 802.11bg Orinoco card connected to the onmidirectional antennae (7 dBi). |
Researchers at UMA during a real scenario test for measuring the actual data bandwidth of the VANET. |
 |
 |
| We connect two cars and two base stations with two Sunit d7 CAR PC's in cars and two laptops with Colubris MAP-330 Multiservice access points as base stations. |
TSBS - hut: exterior, interior and equipment Colubris MAP-330 Multiservice access points as base stations. |
 |
 |
 |
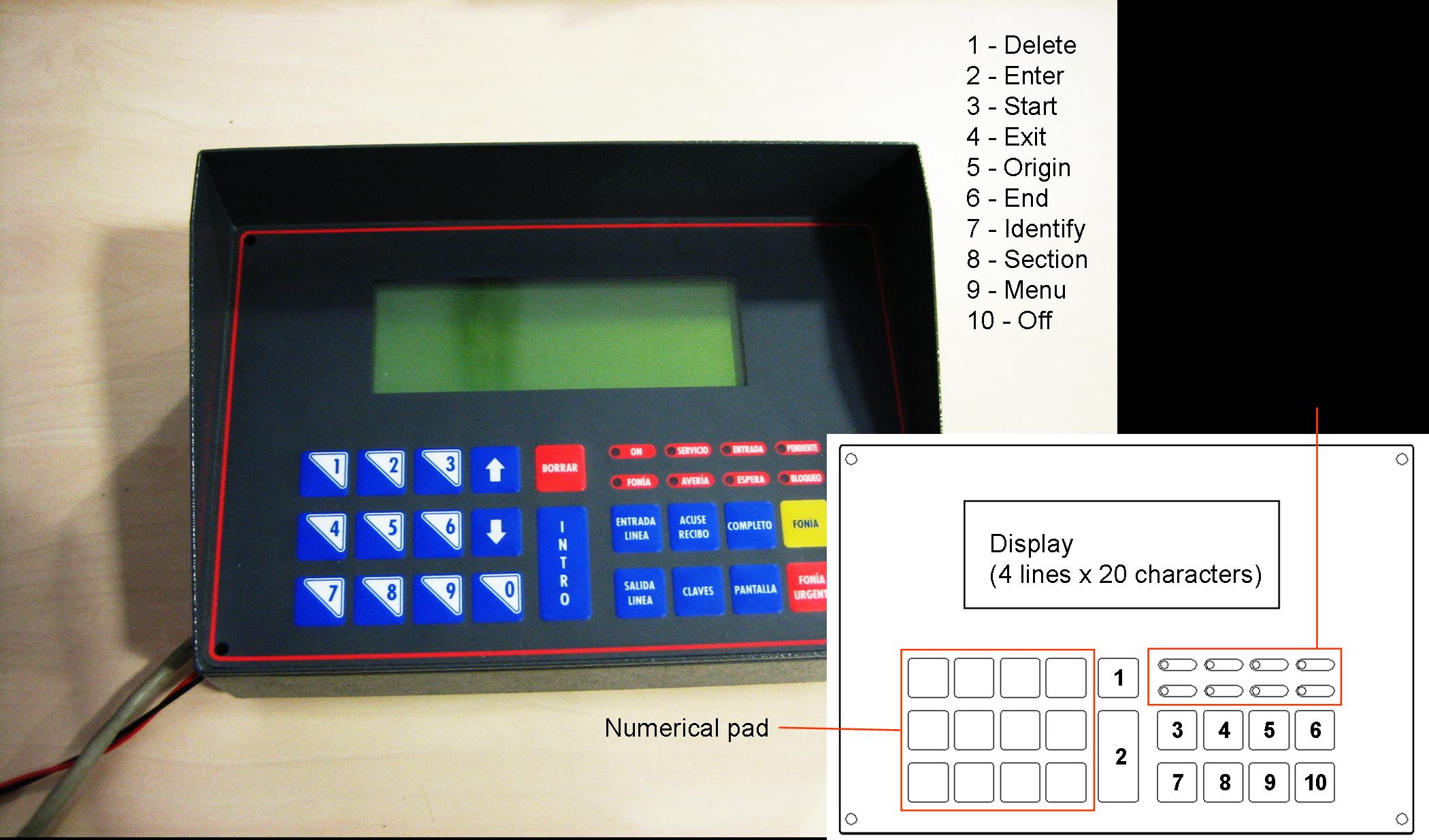
| The console is the interface between the system and the Carlink floating car driver/operator. The configuration parameters from the driver, itinerary, route ... etc. and also the data event acquisition can be easily introduced through the console. |
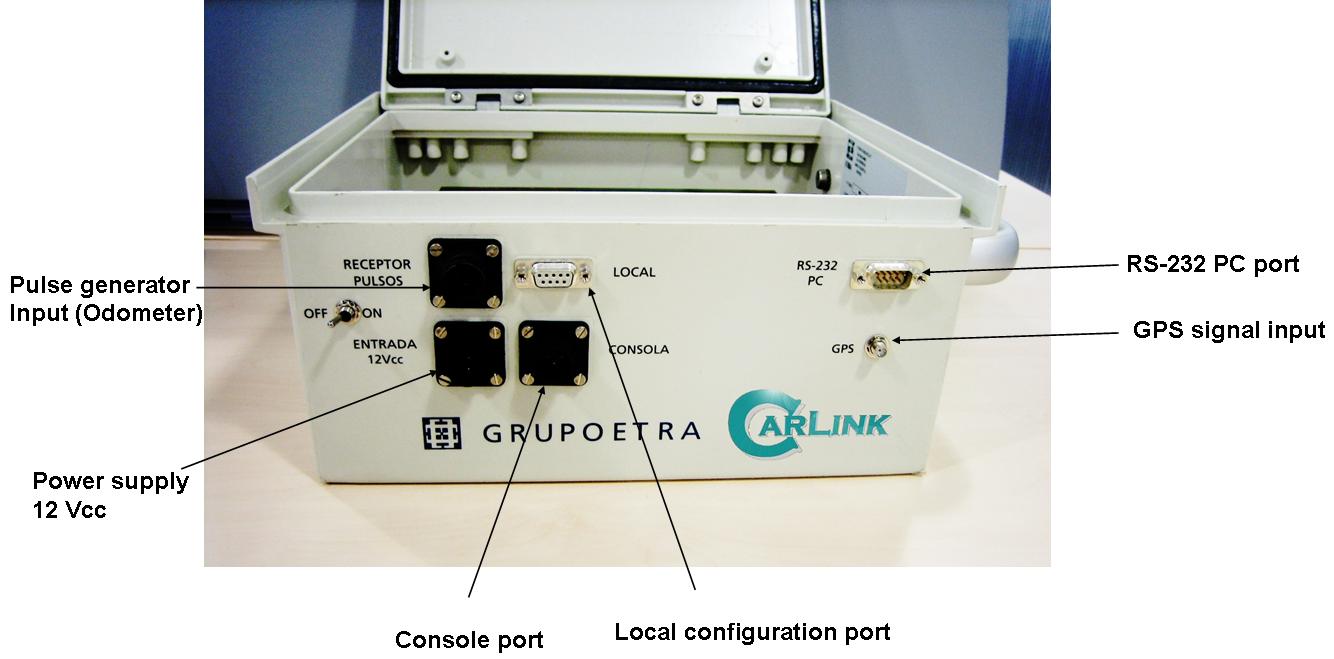
The real time data collector is the core of Carlink floating car system, where the data are treated, stored and sent through GPRS to the Traffic Control Centre. Odometer pulse detector signal and GPS signal are the main data inputs to the Carlink floating car system |
Carlink floating car system. All devices are allocated inside the car constituting a single communication point. |